





რაც შეეხება, რატომ ამოწურვის რეჟიმიMOSFET-ებიარ არის გამოყენებული, არ არის რეკომენდირებული მის ბოლოში მოხვედრა.
ამ ორი გაუმჯობესების რეჟიმის MOSFET-ისთვის NMOS უფრო ხშირად გამოიყენება. მიზეზი ის არის, რომ ზედმიწევნითი წინააღმდეგობა მცირეა და ადვილად დასამზადებელია. ამიტომ, NMOS ჩვეულებრივ გამოიყენება ელექტრომომარაგების და ძრავის დისკის გადართვის პროგრამებში. შემდეგ შესავალში NMOS ძირითადად გამოიყენება.
MOSFET-ის სამ პინს შორის არის პარაზიტული ტევადობა. ეს არ არის ის, რაც ჩვენ გვჭირდება, არამედ გამოწვეულია წარმოების პროცესის შეზღუდვით. პარაზიტული ტევადობის არსებობა უფრო პრობლემურს ხდის ამძრავის მიკროსქემის დიზაინის ან შერჩევისას, მაგრამ ამის თავიდან აცილების გზა არ არსებობს. მას შემდეგ დეტალურად გაგაცნობთ.
დრენაჟსა და წყაროს შორის არის პარაზიტული დიოდი. ამას სხეულის დიოდი ეწოდება. ეს დიოდი ძალიან მნიშვნელოვანია ინდუქციური დატვირთვების მართვისას (როგორიცაა ძრავები). სხვათა შორის, სხეულის დიოდი არსებობს მხოლოდ ერთ MOSFET-ში და ჩვეულებრივ არ გვხვდება ინტეგრირებული მიკროსქემის ჩიპში.
2. MOSFET-ის გამტარობის მახასიათებლები
გამტარობა ნიშნავს გადამრთველის როლს, რაც უდრის გადამრთველის დახურვას.
NMOS-ის მახასიათებელი ის არის, რომ ის ჩაირთვება, როცა Vgs გარკვეულ მნიშვნელობაზე მეტია. ვარგისია გამოსაყენებლად, როდესაც წყარო დამიწებულია (დაბალი დისკი), სანამ კარიბჭის ძაბვა აღწევს 4 ვ ან 10 ვ.
PMOS-ის მახასიათებელია ის, რომ ის ჩაირთვება, როდესაც Vgs გარკვეულ მნიშვნელობაზე ნაკლებია, რაც შესაფერისია იმ სიტუაციებისთვის, როდესაც წყარო დაკავშირებულია VCC-თან (მაღალი დონის დისკზე). თუმცა, თუმცაPMOSადვილად შეიძლება გამოყენებულ იქნას როგორც მაღალი კლასის დრაივერი, NMOS ჩვეულებრივ გამოიყენება მაღალი კლასის დრაივერებში დიდი წინააღმდეგობის, მაღალი ფასის და რამდენიმე შემცვლელი ტიპის გამო.
3. MOS გადამრთველი მილის დაკარგვა
იქნება ეს NMOS თუ PMOS, ჩართვის შემდეგ არის ჩართული წინააღმდეგობა, ამიტომ დენი მოიხმარს ენერგიას ამ წინააღმდეგობაზე. მოხმარებული ენერგიის ამ ნაწილს ეწოდება გამტარობის დაკარგვა. MOSFET-ის არჩევა მცირე წინააღმდეგობის მქონე შეამცირებს გამტარობის დანაკარგებს. დღევანდელი დაბალი სიმძლავრის MOSFET-ის წინააღმდეგობა ჩვეულებრივ დაახლოებით ათეულ მილიოჰმს შეადგენს და ასევე არის რამდენიმე მილიოჰმი.
როდესაც MOSFET ჩართულია და გამორთულია, ის არ უნდა დასრულდეს მყისიერად. MOS-ზე ძაბვას აქვს კლების პროცესი, ხოლო დინებას - მზარდი პროცესი. ამ პერიოდის განმავლობაში,MOSFET-ისდანაკარგი არის ძაბვისა და დენის პროდუქტი, რომელსაც ეწოდება გადართვის დანაკარგი. ჩვეულებრივ გადართვის დანაკარგები გაცილებით დიდია, ვიდრე გამტარობის დანაკარგები და რაც უფრო სწრაფია გადართვის სიხშირე, მით მეტია დანაკარგები.
ძაბვისა და დენის პროდუქტი გამტარობის მომენტში ძალიან დიდია, რაც იწვევს დიდ დანაკარგებს. გადართვის დროის შემცირებამ შეიძლება შეამციროს დანაკარგი ყოველი გამტარობის დროს; გადართვის სიხშირის შემცირებამ შეიძლება შეამციროს გადამრთველების რაოდენობა დროის ერთეულზე. ორივე მეთოდს შეუძლია შეამციროს გადართვის დანაკარგები.
ტალღის ფორმა, როდესაც MOSFET ჩართულია. ჩანს, რომ ძაბვისა და დენის პროდუქტი გამტარობის მომენტში ძალიან დიდია და გამოწვეული დანაკარგიც ასევე ძალიან დიდი. გადართვის დროის შემცირებამ შეიძლება შეამციროს დანაკარგი ყოველი გამტარობის დროს; გადართვის სიხშირის შემცირებამ შეიძლება შეამციროს გადამრთველების რაოდენობა დროის ერთეულზე. ორივე მეთოდს შეუძლია შეამციროს გადართვის დანაკარგები.
4. MOSFET-ის დრაივერი
ბიპოლარულ ტრანზისტორებთან შედარებით, ზოგადად მიჩნეულია, რომ MOSFET-ის ჩართვის დენი არ არის საჭირო, თუ GS ძაბვა გარკვეულ მნიშვნელობაზე მაღალია. ამის გაკეთება ადვილია, მაგრამ ჩვენ ასევე გვჭირდება სიჩქარე.
MOSFET-ის სტრუქტურაში ჩანს, რომ არის პარაზიტული ტევადობა GS-სა და GD-ს შორის და MOSFET-ის მოძრაობა რეალურად არის კონდენსატორის დამუხტვა და განმუხტვა. კონდენსატორის დატენვა მოითხოვს დენს, რადგან კონდენსატორი შეიძლება ჩაითვალოს როგორც მოკლე ჩართვა დამუხტვის მომენტში, ამიტომ მყისიერი დენი შედარებით დიდი იქნება. პირველი, რასაც ყურადღება უნდა მიაქციოთ MOSFET-ის დრაივერის არჩევისას/დაპროექტებისას არის მყისიერი მოკლე ჩართვის დენის რაოდენობა, რომელიც მას შეუძლია. ,
მეორე, რაც გასათვალისწინებელია არის ის, რომ NMOS, რომელიც ჩვეულებრივ გამოიყენება მაღალი დონის მართვისთვის, სჭირდება კარიბჭის ძაბვა უფრო მეტი იყოს, ვიდრე წყაროს ძაბვა, როდესაც ჩართულია. როდესაც მაღალი გვერდითი მოძრავი MOSFET ჩართულია, წყაროს ძაბვა იგივეა, რაც სადრენაჟო ძაბვა (VCC), ამიტომ კარიბჭის ძაბვა 4 ვ ან 10 ვ-ით მეტია VCC-ზე ამ დროს. თუ გსურთ მიიღოთ VCC-ზე მეტი ძაბვა იმავე სისტემაში, გჭირდებათ სპეციალური გამაძლიერებელი წრე. ძრავის ბევრ დრაივერს აქვს ინტეგრირებული დამუხტვის ტუმბოები. უნდა აღინიშნოს, რომ შესაბამისი გარე კონდენსატორი უნდა შეირჩეს MOSFET-ის მართვისთვის საკმარისი მოკლე შერთვის დენის მისაღებად.
ზემოთ ნახსენები 4 ვ ან 10 ვ არის ჩვეულებრივ გამოყენებული MOSFET-ების ჩართვის ძაბვა და, რა თქმა უნდა, გარკვეული ზღვარი უნდა იყოს დაშვებული დიზაინის დროს. და რაც უფრო მაღალია ძაბვა, მით უფრო მაღალია გამტარობის სიჩქარე და მით უფრო მცირეა გამტარობის წინააღმდეგობა. ახლა არის MOSFET-ები მცირე გამტარობის ძაბვით, რომლებიც გამოიყენება სხვადასხვა სფეროში, მაგრამ 12 ვ საავტომობილო ელექტრონულ სისტემებში, ზოგადად, 4 ვ გამტარობა საკმარისია.
MOSFET-ის დრაივერების წრედისთვის და მისი დანაკარგებისთვის, გთხოვთ, იხილეთ Microchip-ის AN799 MOSFET-ის დრაივერების შესატყვისი MOSFET-ებთან. ძალიან დეტალურია, ამიტომ მეტს აღარ დავწერ.
ძაბვისა და დენის პროდუქტი გამტარობის მომენტში ძალიან დიდია, რაც იწვევს დიდ დანაკარგებს. გადართვის დროის შემცირებამ შეიძლება შეამციროს დანაკარგი ყოველი გამტარობის დროს; გადართვის სიხშირის შემცირებამ შეიძლება შეამციროს გადამრთველების რაოდენობა დროის ერთეულზე. ორივე მეთოდს შეუძლია შეამციროს გადართვის დანაკარგები.
MOSFET არის FET-ის ტიპი (მეორე არის JFET). მისი დაყენება შესაძლებელია გაუმჯობესების რეჟიმში ან ამოწურვის რეჟიმში, P-არხი ან N-არხი, სულ 4 ტიპის. თუმცა, რეალურად გამოიყენება მხოლოდ გაუმჯობესების რეჟიმის N-არხის MOSFET. და გაუმჯობესების ტიპის P-არხის MOSFET, ამიტომ NMOS ან PMOS ჩვეულებრივ ეხება ამ ორ ტიპს.
5. MOSFET-ის გამოყენების წრე?
MOSFET-ის ყველაზე მნიშვნელოვანი მახასიათებელია მისი კარგი გადართვის მახასიათებლები, ამიტომ იგი ფართოდ გამოიყენება სქემებში, რომლებიც საჭიროებენ ელექტრონულ გადამრთველებს, როგორიცაა კვების წყაროების და ძრავის დისკების გადართვა, ასევე განათების ჩაქრობა.
დღევანდელ MOSFET დრაივერებს აქვთ რამდენიმე სპეციალური მოთხოვნა:
1. დაბალი ძაბვის გამოყენება
5 ვ ელექტრომომარაგების გამოყენებისას, თუ ამ დროს გამოიყენება ტრადიციული ტოტემური ბოძების სტრუქტურა, ვინაიდან ტრანზისტორს აქვს ძაბვის ვარდნა დაახლოებით 0,7 ვ, რეალური საბოლოო ძაბვა, რომელიც გამოიყენება კარიბჭეზე, არის მხოლოდ 4,3 ვ. ამ დროს ვირჩევთ კარიბჭის ნომინალურ სიმძლავრეს
არსებობს გარკვეული რისკი 4,5 ვოლტიანი MOSFET-ის გამოყენებისას. იგივე პრობლემა ჩნდება 3 ვ ან სხვა დაბალი ძაბვის კვების წყაროების გამოყენებისას.
2. ფართო ძაბვის გამოყენება
შეყვანის ძაბვა არ არის ფიქსირებული მნიშვნელობა, ის შეიცვლება დროთა ან სხვა ფაქტორებით. ეს ცვლილება იწვევს MOSFET-ზე PWM მიკროსქემის მიერ მოწოდებული მამოძრავებელი ძაბვის არასტაბილურობას.
იმისათვის, რომ MOSFET-ები იყოს უსაფრთხო მაღალი კარიბჭის ძაბვის პირობებში, ბევრ MOSFET-ს აქვს ჩაშენებული ძაბვის რეგულატორები, რათა იძულებით შეზღუდონ კარიბჭის ძაბვის ამპლიტუდა. ამ შემთხვევაში, როდესაც მოწოდებული მამოძრავებელი ძაბვა აღემატება ძაბვის რეგულატორის მილის ძაბვას, ეს გამოიწვევს დიდ სტატიკური ენერგიის მოხმარებას.
ამავდროულად, თუ თქვენ უბრალოდ იყენებთ რეზისტორის ძაბვის გაყოფის პრინციპს კარიბჭის ძაბვის შესამცირებლად, MOSFET კარგად იმუშავებს, როდესაც შეყვანის ძაბვა შედარებით მაღალია, მაგრამ როდესაც შეყვანის ძაბვა მცირდება, კარიბჭის ძაბვა იქნება არასაკმარისი, რაც იწვევს არასრული გამტარობა, რითაც იზრდება ენერგიის მოხმარება.
3. ორმაგი ძაბვის გამოყენება
ზოგიერთ საკონტროლო წრეში, ლოგიკური ნაწილი იყენებს ტიპიურ 5V ან 3.3V ციფრულ ძაბვას, ხოლო დენის ნაწილი იყენებს ძაბვას 12V ან უფრო მაღალზე. ორი ძაბვა დაკავშირებულია საერთო მიწასთან.
ეს აჩენს მოთხოვნას მიკროსქემის გამოყენების შესახებ, რათა დაბალ ძაბვის მხარემ ეფექტურად გააკონტროლოს MOSFET მაღალი ძაბვის მხარეს. ამავდროულად, MOSFET მაღალი ძაბვის მხარეს ასევე შეექმნება 1 და 2-ში აღნიშნულ პრობლემებს.
ამ სამ შემთხვევაში, ტოტემური პოლუსის სტრუქტურა ვერ აკმაყოფილებს გამომავალი მოთხოვნებს და ბევრი გამოშვებული MOSFET-ის დრაივერი IC არ შეიცავს კარიბჭის ძაბვის შემზღუდველ სტრუქტურებს.
ასე რომ, მე შევქმენი შედარებით ზოგადი წრე ამ სამი მოთხოვნილების დასაკმაყოფილებლად.
,
დრაივერის წრე NMOS-ისთვის
აქ მე გავაკეთებ მხოლოდ NMOS დრაივერის მიკროსქემის მარტივ ანალიზს:
Vl და Vh არის დაბალი და მაღალი დონის კვების წყაროები შესაბამისად. ორი ძაბვა შეიძლება იყოს იგივე, მაგრამ Vl არ უნდა აღემატებოდეს Vh.
Q1 და Q2 ქმნიან ინვერსიულ ტოტემ ბოძს, რათა მიაღწიონ იზოლაციას და უზრუნველყონ, რომ ორი წამყვანი მილები Q3 და Q4 ერთდროულად არ ჩართონ.
R2 და R3 უზრუნველყოფს PWM ძაბვის მითითებას. ამ მითითების შეცვლით, მიკროსქემის მუშაობა შესაძლებელია ისეთ მდგომარეობაში, სადაც PWM სიგნალის ტალღის ფორმა შედარებით ციცაბოა.
Q3 და Q4 გამოიყენება დისკის დენის უზრუნველსაყოფად. როდესაც ჩართულია, Q3 და Q4 აქვთ მხოლოდ Vce ძაბვის მინიმალური ვარდნა Vh და GND-თან შედარებით. ეს ძაბვის ვარდნა ჩვეულებრივ მხოლოდ 0.3 ვ-ია, რაც გაცილებით დაბალია ვიდრე Vce 0.7 ვ.
R5 და R6 არის უკუკავშირის რეზისტორები, რომლებიც გამოიყენება კარიბჭის ძაბვის შესამოწმებლად. შერჩეული ძაბვა წარმოქმნის ძლიერ უარყოფით უკუკავშირს Q1 და Q2-დან Q5-მდე, რითაც ზღუდავს კარიბჭის ძაბვას შეზღუდულ მნიშვნელობამდე. ეს მნიშვნელობა შეიძლება დარეგულირდეს R5 და R6 მეშვეობით.
დაბოლოს, R1 უზრუნველყოფს ბაზის დენის ლიმიტს Q3 და Q4-სთვის, ხოლო R4 უზრუნველყოფს კარიბჭის დენის ლიმიტს MOSFET-ისთვის, რომელიც არის Q3 და Q4 ყინულის ლიმიტი. საჭიროების შემთხვევაში, აჩქარების კონდენსატორი შეიძლება დაუკავშირდეს R4-ის პარალელურად.
ეს წრე უზრუნველყოფს შემდეგ მახასიათებლებს:
1. გამოიყენეთ დაბალი მხარის ძაბვა და PWM მაღალი გვერდითი MOSFET-ის მართვით.
2. გამოიყენეთ მცირე ამპლიტუდის PWM სიგნალი MOSFET-ის მართვით მაღალი კარიბჭის ძაბვის მოთხოვნებით.
3. კარიბჭის ძაბვის პიკური ზღვარი
4. შეყვანისა და გამომავალი დენის ლიმიტები
5. შესაბამისი რეზისტორების გამოყენებით მიიღწევა ძალზე დაბალი ენერგიის მოხმარება.
6. PWM სიგნალი ინვერსიულია. NMOS-ს ეს ფუნქცია არ სჭირდება და მისი მოგვარება შესაძლებელია წინ ინვერტორის განთავსებით.
პორტატული მოწყობილობებისა და უკაბელო პროდუქტების დიზაინის შექმნისას, პროდუქტის მუშაობის გაუმჯობესება და ბატარეის მუშაობის გახანგრძლივება არის ორი საკითხი, რომელიც დიზაინერებს უნდა შეექმნათ. DC-DC კონვერტორებს აქვთ მაღალი ეფექტურობის, დიდი გამომავალი დენის და დაბალი ჩუმად დენის უპირატესობები, რაც მათ შესაფერისს ხდის პორტატული მოწყობილობების კვებისათვის. ამჟამად, DC-DC კონვერტორის დიზაინის ტექნოლოგიის განვითარების ძირითადი ტენდენციებია: (1) მაღალი სიხშირის ტექნოლოგია: გადართვის სიხშირის მატებასთან ერთად, გადართვის კონვერტორის ზომა ასევე მცირდება, ასევე მნიშვნელოვნად იზრდება დენის სიმკვრივე. და დინამიური პასუხი გაუმჯობესებულია. . დაბალი სიმძლავრის DC-DC გადამყვანების გადართვის სიხშირე გაიზრდება მეგაჰერცის დონემდე. (2) დაბალი გამომავალი ძაბვის ტექნოლოგია: ნახევარგამტარების წარმოების ტექნოლოგიის უწყვეტი განვითარებით, მიკროპროცესორებისა და პორტატული ელექტრონული მოწყობილობების საოპერაციო ძაბვა სულ უფრო და უფრო იკლებს, რაც მოითხოვს მომავალ DC-DC კონვერტორებს, უზრუნველყონ დაბალი გამომავალი ძაბვა მიკროპროცესორებთან ადაპტაციისთვის. მოთხოვნები პროცესორებისა და პორტატული ელექტრონული მოწყობილობების მიმართ.
ამ ტექნოლოგიების განვითარებამ წამოაყენა უფრო მაღალი მოთხოვნები ელექტრო ჩიპების სქემების დიზაინისთვის. უპირველეს ყოვლისა, გადართვის სიხშირის ზრდასთან ერთად, მაღალი მოთხოვნები დგება გადართვის ელემენტების მუშაობაზე. ამავდროულად, შესაბამისი გადამრთველი ელემენტის წამყვანი სქემები უნდა იყოს უზრუნველყოფილი, რათა უზრუნველყოს გადართვის ელემენტების ნორმალურად მუშაობა გადართვის სიხშირეებზე MHz-მდე. მეორეც, ბატარეაზე მომუშავე პორტატული ელექტრონული მოწყობილობებისთვის, მიკროსქემის სამუშაო ძაბვა დაბალია (მაგალითად, ლითიუმის ბატარეები აიღეთ, სამუშაო ძაბვა არის 2.5~3.6V), შესაბამისად, დენის ჩიპის სამუშაო ძაბვა დაბალია.
MOSFET-ს აქვს ძალიან დაბალი წინააღმდეგობა და მოიხმარს დაბალ ენერგიას. MOSFET ხშირად გამოიყენება როგორც დენის გადამრთველი ამჟამად პოპულარულ მაღალეფექტურ DC-DC ჩიპებში. თუმცა, MOSFET-ის დიდი პარაზიტული ტევადობის გამო, NMOS გადართვის მილების კარიბჭის ტევადობა ზოგადად ათობით პიკოფარადს აღწევს. ეს აყენებს უფრო მაღალ მოთხოვნებს მაღალი ოპერაციული სიხშირის DC-DC კონვერტორის გადამრთველი მილის წამყვანი მიკროსქემის დიზაინისთვის.
დაბალი ძაბვის ULSI დიზაინებში, არსებობს სხვადასხვა CMOS და BiCMOS ლოგიკური სქემები, რომლებიც იყენებენ ჩატვირთვის გამაძლიერებელ სტრუქტურებს და წამყვანი სქემებს, როგორც დიდი ტევადობის დატვირთვას. ამ სქემებს შეუძლიათ ნორმალურად იმუშაონ 1 ვ-ზე დაბალი ელექტრომომარაგების ძაბვით და შეუძლიათ იმუშაონ ათობით მეგაჰერცის ან თუნდაც ასობით მეგაჰერცის სიხშირით, დატვირთვის ტევადობით 1-დან 2 pF-მდე. ეს სტატია იყენებს ჩატვირთვის გამაძლიერებელ წრეს, რათა შეიმუშაოს წამყვანი წრედი დიდი დატვირთვის ტევადობის დისკის შესაძლებლობით, რომელიც შესაფერისია დაბალი ძაბვის, მაღალი გადართვის სიხშირის გამაძლიერებელი DC-DC კონვერტორებისთვის. წრე შექმნილია Samsung AHP615 BiCMOS პროცესის საფუძველზე და დამოწმებულია Hspice სიმულაციის საშუალებით. როდესაც მიწოდების ძაბვა არის 1,5 ვ და დატვირთვის ტევადობა 60 pF, სამუშაო სიხშირე შეიძლება მიაღწიოს 5 MHz-ზე მეტს.
,
MOSFET გადართვის მახასიათებლები
,
1. სტატიკური მახასიათებლები
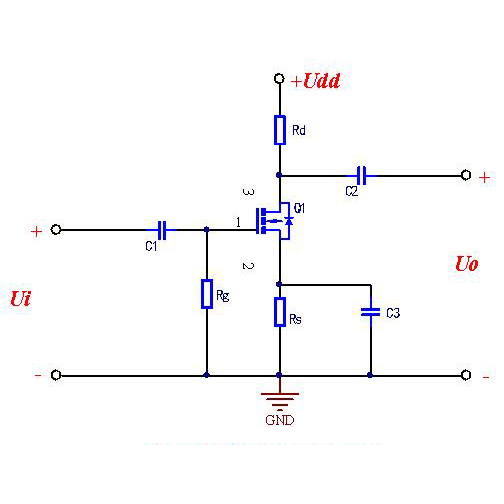
როგორც გადართვის ელემენტი, MOSFET ასევე მუშაობს ორ მდგომარეობაში: გამორთული ან ჩართული. ვინაიდან MOSFET არის ძაბვით კონტროლირებადი კომპონენტი, მისი სამუშაო მდგომარეობა ძირითადად განისაზღვრება კარიბჭის წყაროს ძაბვით uGS.
სამუშაო მახასიათებლები შემდეგია:
※ uGS<ჩართვის ძაბვა UT: MOSFET მუშაობს გამორთვის ზონაში, გადინების წყაროს დენი iDS ძირითადად არის 0, გამომავალი ძაბვა uDS≈UDD და MOSFET არის "გამორთული" მდგომარეობაში.
※ uGS>ჩართვა ძაბვა UT: MOSFET მუშაობს გამტარობის რეგიონში, გადინების წყაროს დენი iDS=UDD/(RD+rDS). მათ შორის, rDS არის გადინების წყაროს წინააღმდეგობა, როდესაც MOSFET ჩართულია. გამომავალი ძაბვა UDS=UDD?rDS/(RD+rDS), თუ rDS<<RD, uDS≈0V, MOSFET არის "ჩართული" მდგომარეობაში.
2. დინამიური მახასიათებლები
MOSFET-ს ასევე აქვს გარდამავალი პროცესი ჩართვისა და გამორთვის მდგომარეობებს შორის გადართვისას, მაგრამ მისი დინამიური მახასიათებლები ძირითადად დამოკიდებულია წრესთან დაკავშირებული მაწანწალა ტევადობის დამუხტვისა და განმუხტვისთვის საჭირო დროზე და მუხტის დაგროვებასა და განმუხტვაზე, როდესაც თავად მილი ჩართულია და გამორთულია. გაფრქვევის დრო ძალიან მცირეა.
როდესაც შეყვანის ძაბვის ui იცვლება მაღალიდან დაბალზე და MOSFET იცვლება ჩართული მდგომარეობიდან გამორთვის მდგომარეობაში, კვების წყარო UDD იტვირთება მაწანწალა ტევადობა CL RD-მდე და დატენვის დროის მუდმივი τ1=RDCL. ამიტომ, გამომავალი ძაბვა uo-მ უნდა გაიაროს გარკვეული შეფერხება დაბალი დონიდან მაღალ დონეზე გადასვლამდე; როდესაც შეყვანის ძაბვის ui იცვლება დაბალიდან მაღალზე და MOSFET იცვლება გამორთული მდგომარეობიდან ჩართულ მდგომარეობაში, მაწანწალა ტევადობის CL-ის დამუხტვა გადის rDS-ზე. ჩანს, რომ გამომავალი ძაბვა Uo-ს ასევე სჭირდება გარკვეული შეფერხება, სანამ ის დაბალ დონეზე გადადის. მაგრამ იმის გამო, რომ rDS გაცილებით მცირეა ვიდრე RD, გარდაქმნის დრო გათიშვიდან გამტარობამდე უფრო მოკლეა, ვიდრე კონვერტაციის დრო გამტარობიდან წყვეტამდე.
ვინაიდან MOSFET-ის გადინების წყაროს წინააღმდეგობა rDS, როდესაც ის ჩართულია, ბევრად აღემატება ტრანზისტორის გაჯერების წინააღმდეგობას rCES, ხოლო გარე გადინების წინააღმდეგობა RD ასევე უფრო დიდია, ვიდრე ტრანზისტორის კოლექტორის წინააღმდეგობა, დატენვის და განმუხტვის დრო. MOSFET-ის უფრო გრძელია, რაც MOSFET-ს ქმნის. გადართვის სიჩქარე უფრო დაბალია ვიდრე ტრანზისტორი. თუმცა, CMOS სქემებში, რადგან დატენვის წრე და განმუხტვის წრე ორივე დაბალი წინააღმდეგობის სქემებია, დატენვის და განმუხტვის პროცესები შედარებით სწრაფია, რაც იწვევს CMOS მიკროსქემის გადართვის მაღალ სიჩქარეს.
-
დიდი პაკეტის MOSFET დრაივერის წრე
-
რა როლი აქვს მცირე ძაბვის MOSFET-ებს?
-

რომელი ბრენდის MOSFET არის კარგი
-

როგორ განვსაზღვროთ nMOSFET და pMOSFET
-
MOSFET-ების არჩევის სწორი გზა
-

MOSFET გამაძლიერებლების სრული გზამკვლევი: B-დან...
-

როგორ ავირჩიოთ მძღოლის ყველაზე შესაფერისი წრე ...
-

იცით MOSFET-ის დრაივერის წრე?
-

MOSFET-ის ძირითადი იდენტიფიკაცია და ტესტირება
-

მოკლედ ისაუბრეთ თ...
-

MOSFET კარიბჭის წყაროს დაცვა
-

როგორ განვსაზღვროთ მაღალი სიმძლავრის MOSFET-ის დამწვრობა...
-

MOSFET-ის ძირითადი გაგება
-
MOSFET-ების სამი ძირითადი როლი
-

როგორ ავიცილოთ თავიდან MOSFET-ის უკმარისობა
-

იცოდით MOSFET-ის ევოლუციის შესახებ?



